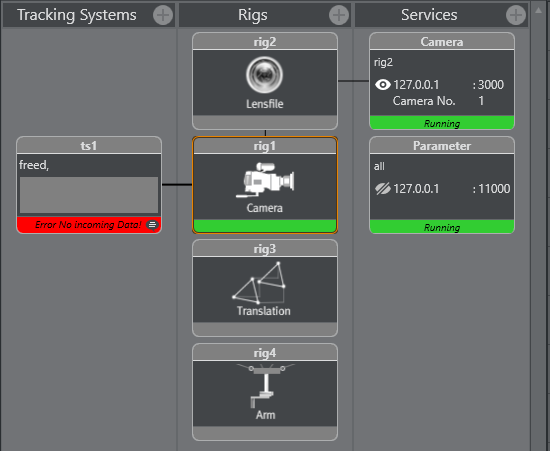
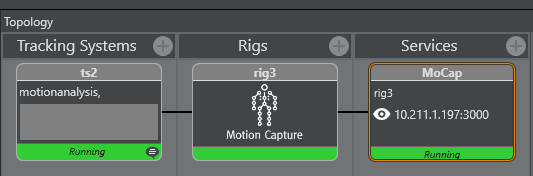
The Topology Panel shows a representation of the tracking systems, the connection to a Viz Engine and which Viz Engine services are in use.
Tracking Systems
The Tracking System panel represents the tracking software in the studio. Click on a tracking system icon to view its properties (see Parameter Panel). A line from the tracking system represents a connection to a Rig.
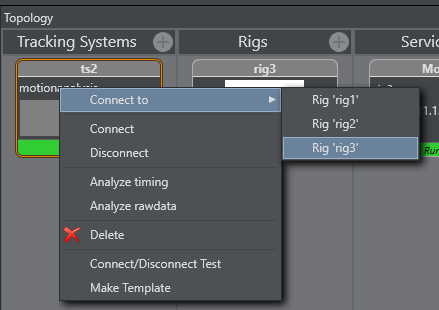
Right-click Menu:
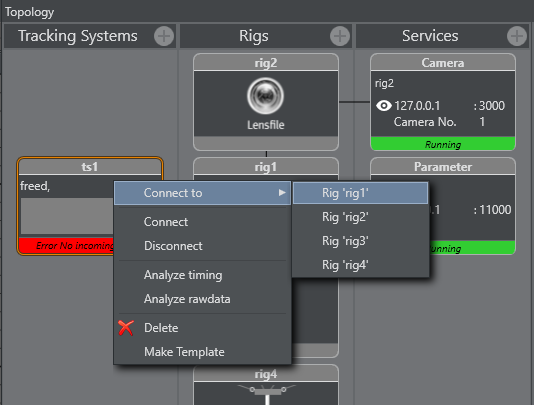
Connect to: Connects to a Rig.
Connect/Disconnect: Connects to or disconnects from the tracking system.
Analyze timing: Shows time analysis.
Analyze rawdata: Enables or disables the collection of raw data for analytical purposes.
Delete: Removes the Tracking System.
Rigs
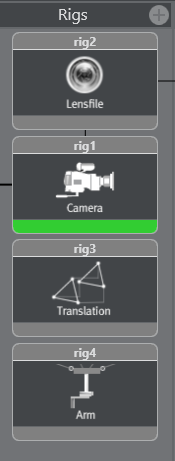
A Rig is the interface between the Tracking System and Viz Engine. Click on any Rig icon to view its properties (see Parameter Panel). A line from a Rig on the left represents a connection to a tracking system (see Tracking Systems). A line from a Rig on the right represents a connection to a Service (see Services).
Rigs are defined as the following types:
Translation
Arm
Crane Head
Location Pivot Rotation
Pivot Rotation
Camera Standard (rotation order YXZ Pan - Tilt - Roll)
CameraXZY (rotation order YZX Pan - Roll - Tilt)
CameraYXZ (rotation order ZXY Roll - Tilt - Pan)
CameraFD (special design for Spidercam construction)
Object
Extended LensParameters
Lensfile
Lensfile Focal Distance
Gimbal Camera
The Translation rig is for position data only, and provides the Tracking Hub with the following parameters:
pos_x
pos_y
pos_z
The Arm rig can be rotated in three dimensions, and starts with a swivel. It has a defined length with a defined direction, and offsets between swivel and length. Both the Translation and Arm rigs are used for camera systems such as Spidercam:
The Location Pivot Rotation rig is a rotation interface in the X-Z dimension, with center point (0/0). Pivot Rotation is a rotation rig with a definable center point. The rig provides the Tracking Hub with the following coordinates:
pivotx
pivoty
pivotz
Camera is a basic rig for tracked cameras. Object is a basic object for tracked objects.
Services
A Service is the element of a Viz Engine which is connected to the Tracking System through the Rig. Click on a Service icon to view its properties (see Parameter Panel). A line from the a Service represents a connection to a Rig (see Rigs).
Available Services are:
Camera: Tracks a camera for Viz Engine.
Object: Tracks an object with Viz Engine.
Parameter: Provides all required data for the creation of the 3D View.
MoCap: Captures motion for Viz Engine.
Communication Timing: Sends timing information which are measured during tracking data acquisition.
Tracking Timing: Sends timing information which are measured during sending the data as service to Viz Engines.
Timecode Service: Used for post and replay.
Multi Object Service: For TrackMen object tracker.
Tracking Flow and Tracking Flow Raw Service: Used to analyze incoming tracking data.
NDI Service: Used for embedding tracking data into NDI stream.
TC Camera: Used by the Viz Libero System.
Right-click display object for additional menu:
Analyze timing: See Analyze Time.
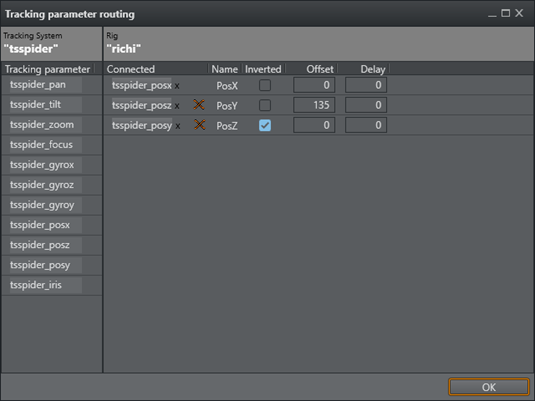
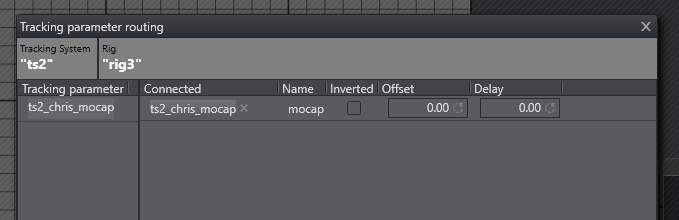
Topology Connection Lines
The Topology Connection Lines show the connections between each item in the Topology. Double-clicking a Topology connection line between a Tracking System and a Rig opens the Tracking parameter routing window for the connection:
Topology Colors
The colors of the icons in the Topology view show the working condition:
Green: Everything is OK and in regular working condition.
Grey: The tracker is not connected or deactivated.
Orange: The Service or Tracker state is in warning condition. See the log or message for more information.
Red: The Service or Tracker state has a serious error. See log or message for more information.
Motion Capturing with Motion Analysis
Motion Capturing is a special way of collecting and forwarding data to an Engine. This mode transmits movements of a person or people instead of camera positions. For these special procedures, there is a new rig and a new service available.
Selectable via the menu:
Rigs > Add MoCap
Services > Add MoCap service
Connect the Motion Analysis Tracking System to the MoCap Rig as usual.
In this case, there is just one axis available.
The name of the axis depends on the used name in MA's Cortex. Mocap Service can be used as other services.